# Bills of material and hardware compenent features
# Ceiling module | AT34 USB Tester
[](https://wiki.stadtfabrikanten.org/uploads/images/gallery/2026-06/YQs6SoxyY2ibT4DH-grafik.png)
This is used to check the voltage of Raspberry Pi and to validate occuring undervoltage happenings. It's a really useful helper.
# Ceiling module | Duet 2 Ethernet v1.04
[](https://wiki.stadtfabrikanten.org/uploads/images/gallery/2026-06/AoGaSFyk34yI2do7-grafik.png) [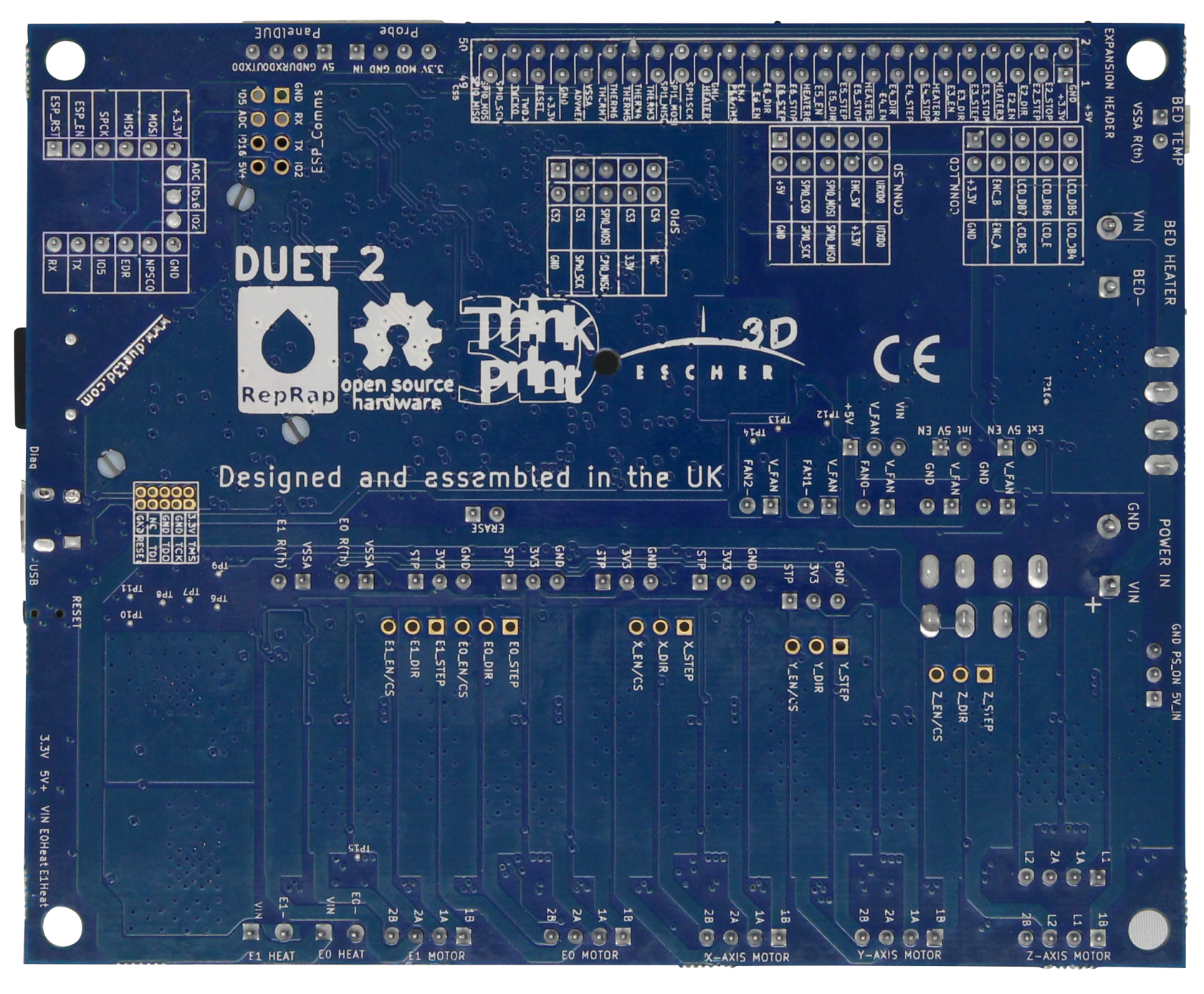](https://wiki.stadtfabrikanten.org/uploads/images/gallery/2026-06/l7sicPYcukxeSOHj-grafik.png) [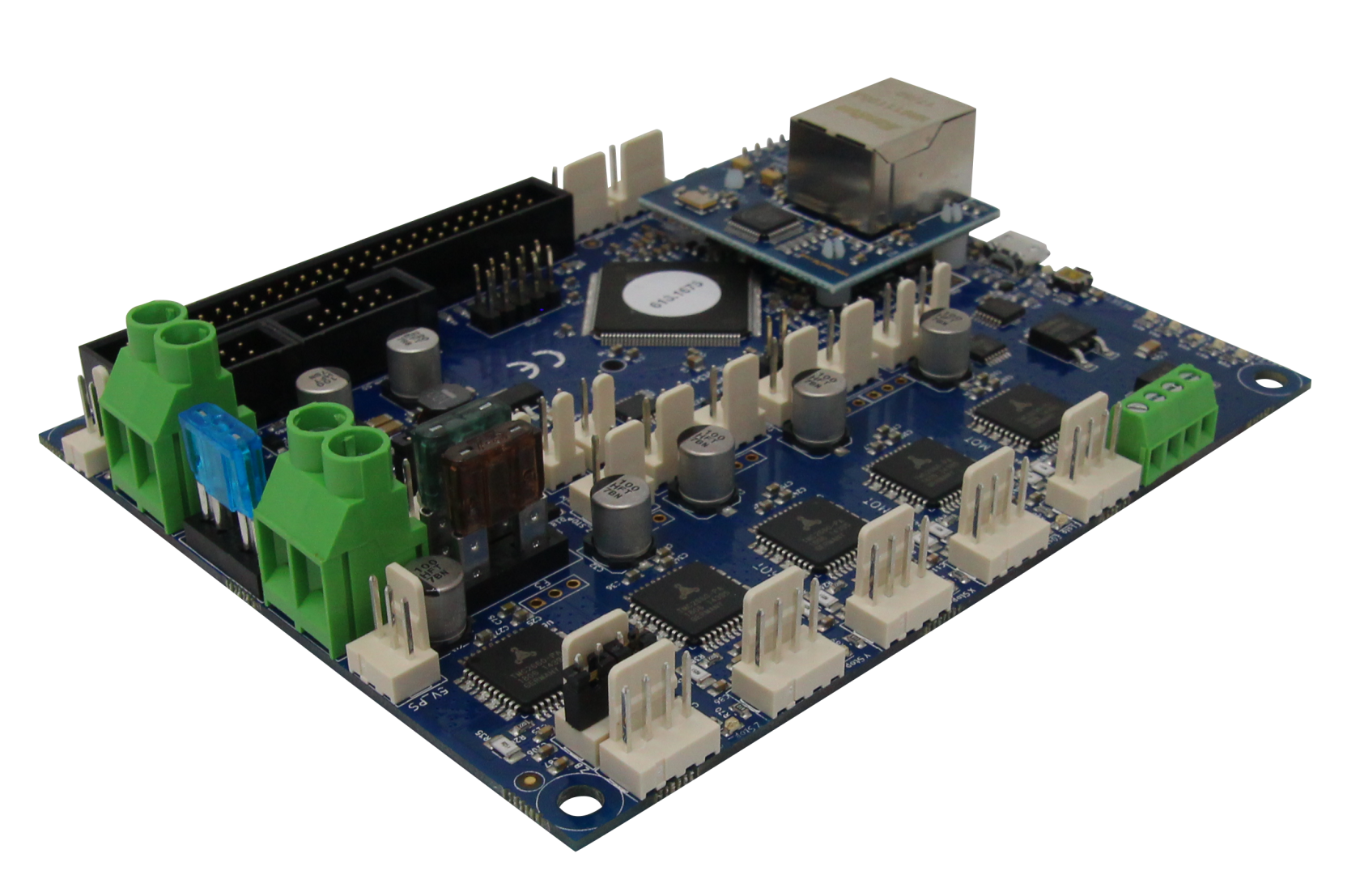](https://wiki.stadtfabrikanten.org/uploads/images/gallery/2026-06/PhXhtlsvVtbpqAQ5-grafik.png) [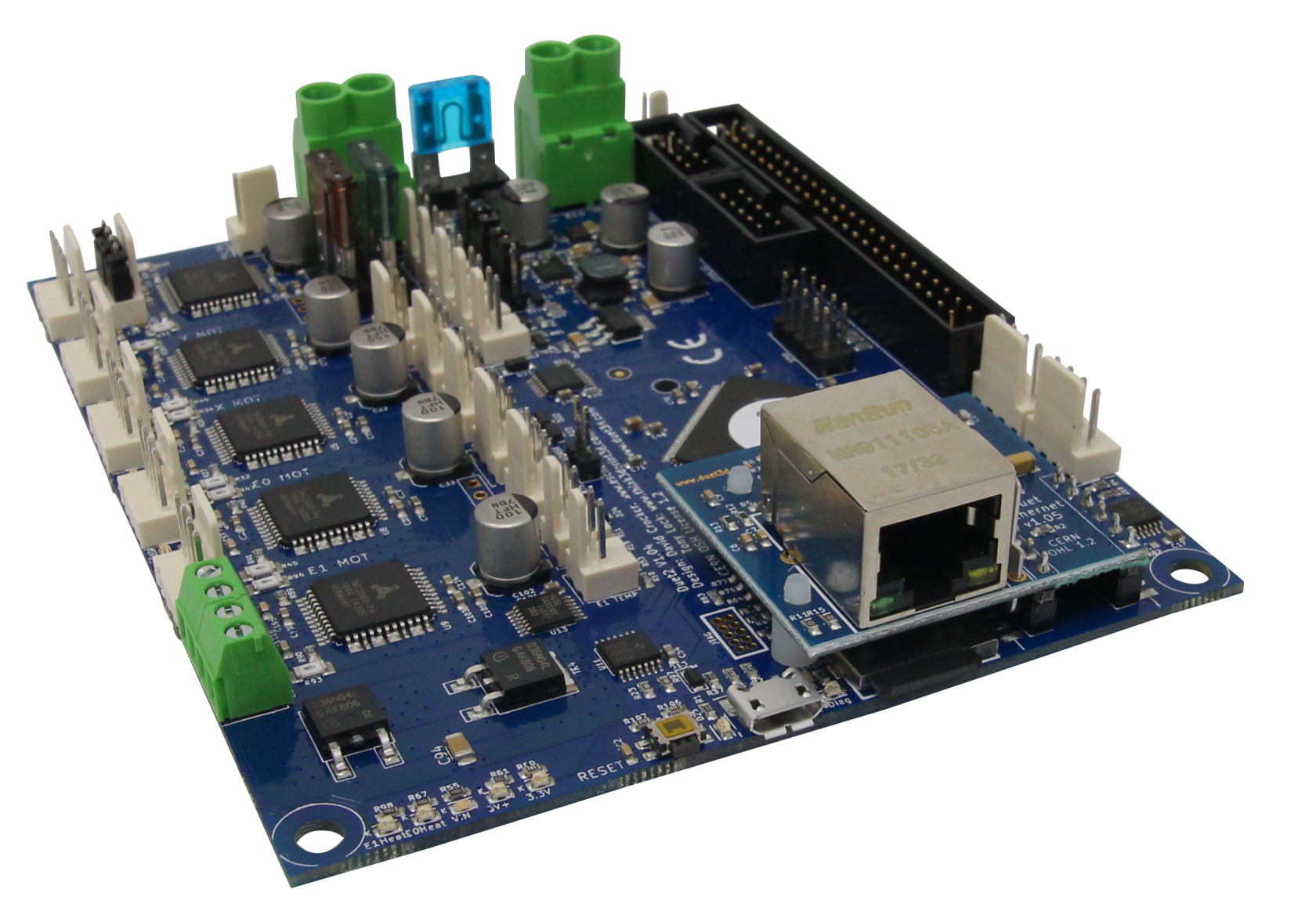](https://wiki.stadtfabrikanten.org/uploads/images/gallery/2026-06/qAUX8Ra4EUHjeIhl-grafik.png) [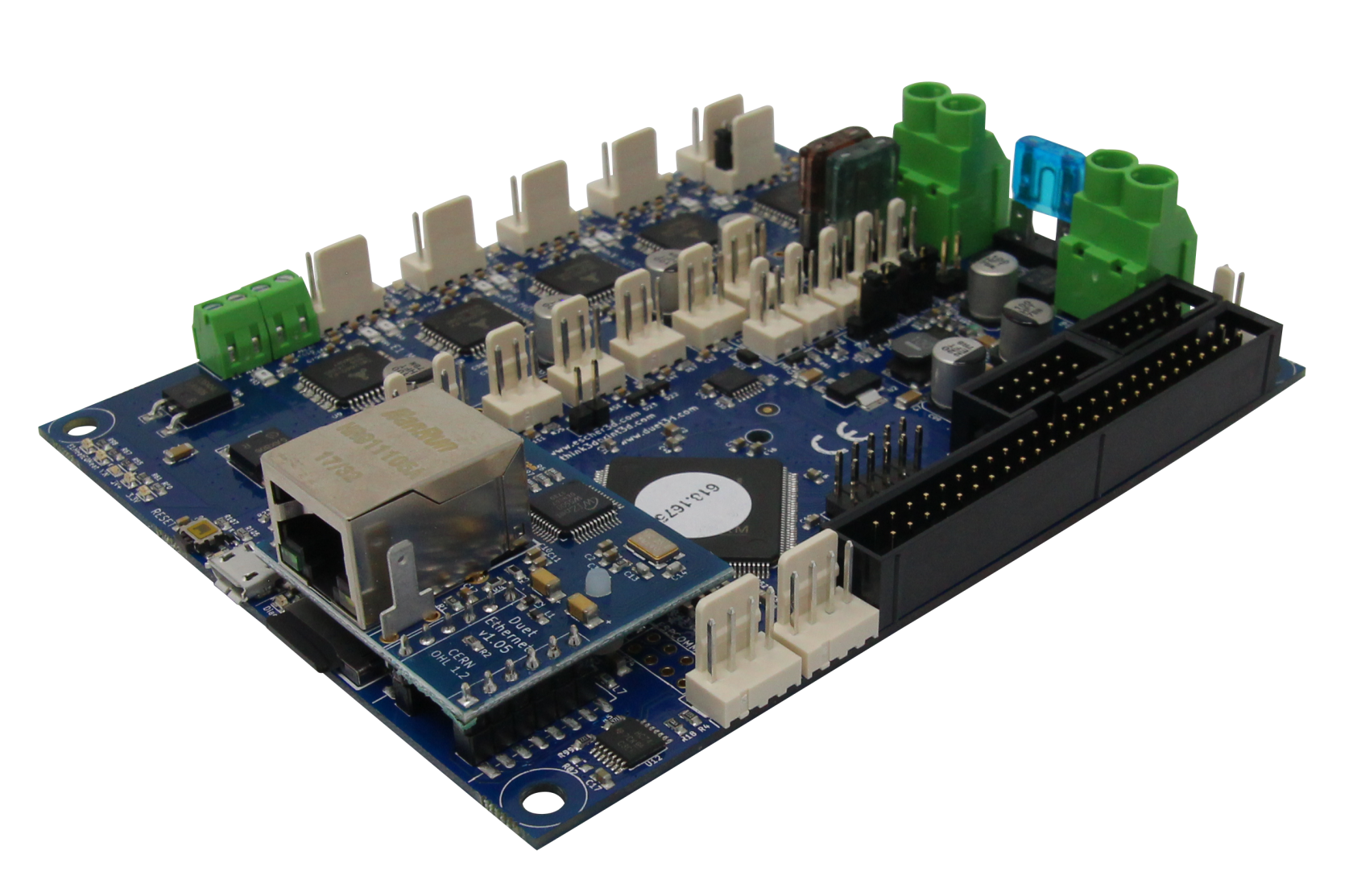](https://wiki.stadtfabrikanten.org/uploads/images/gallery/2026-06/92s7tte8Pa2uCiiO-grafik.png)
[](https://wiki.stadtfabrikanten.org/uploads/images/gallery/2026-06/RkvpzXBea2sJAib5-grafik.png) [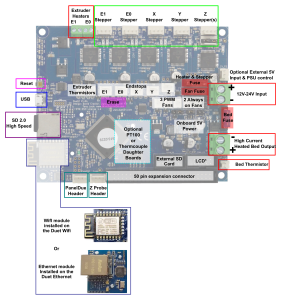](https://wiki.stadtfabrikanten.org/uploads/images/gallery/2026-06/mpoiOCbSFyS4rinN-grafik.png)
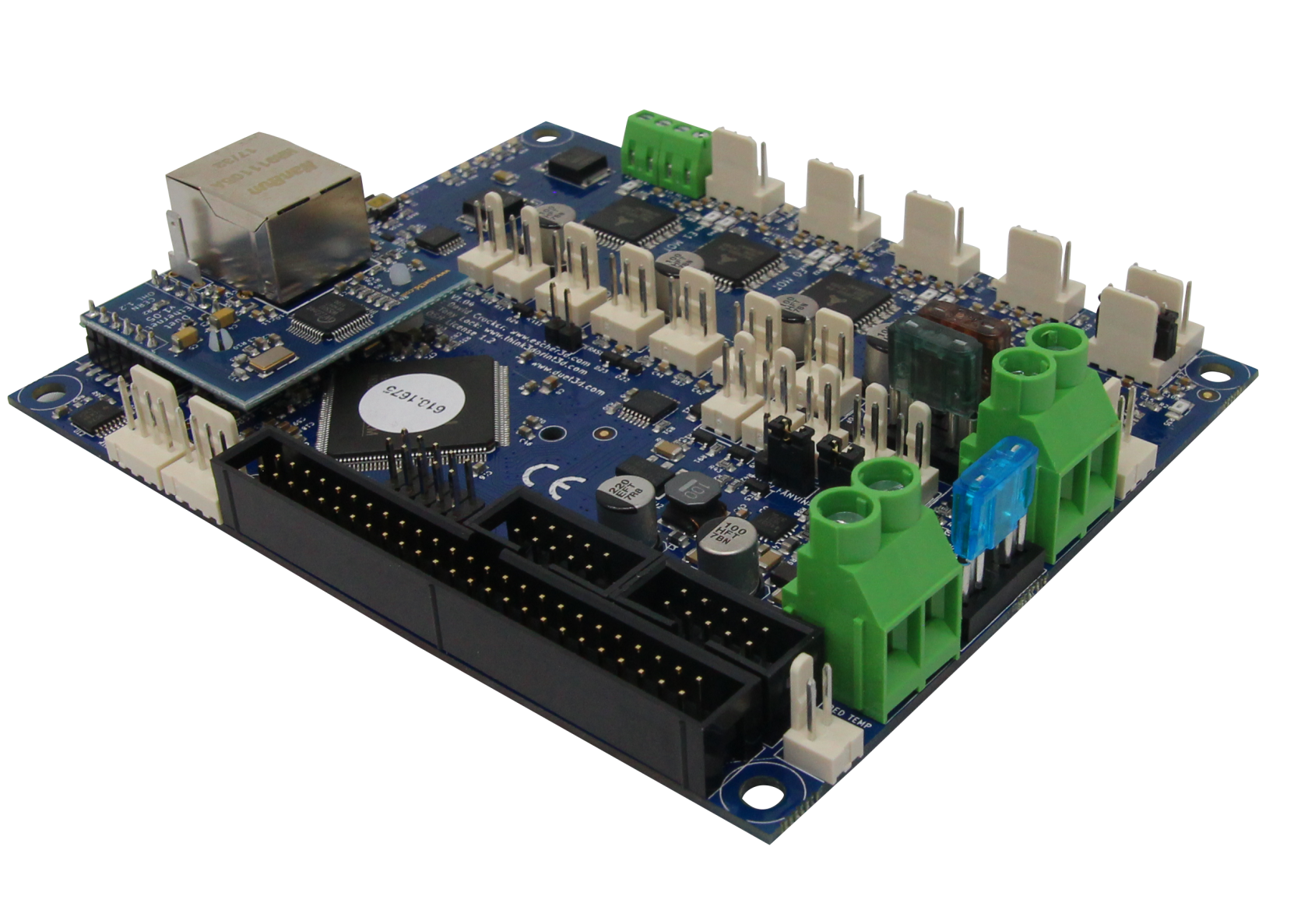
# Description (copied from [https://www.duet3d.com/DuetEthernet](https://www.duet3d.com/DuetEthernet))
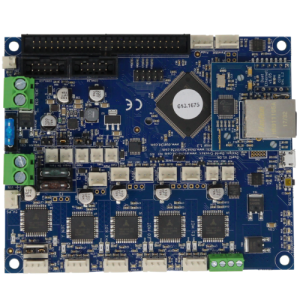
This is the latest PCB revision of the Duet 2 Ethernet, v1.04.
The Duet 2 Ethernet is an advanced 32 bit electronics board for the control of 3D printers and other CNC machines. It has the same features as the [Duet 2 Wifi](https://www.duet3d.com/DuetWifi), other than providing ethernet connectivity rather than Wifi, a [full feature description is available on our documentation](https://duet3d.dozuki.com/Wiki/Hardware_Overview), in summary:
- Powerful 32 Bit Processor
- Dedicated ethernet module.
- Super quiet TMC2660 stepper drivers, up to 256 microstepping.
- High speed SD card and support for a second SD external card if required.
- Dual extruders on the main board, up to 5 more extruders on the [expansion board](https://www.duet3d.com/Duex5).
- High Power rating: Each stepper driver is capable of 2.8A motor current, currently limited in software to 2.4A. The bed heater channel is specifically designed for high current (18A).
- Connect via PC, tablet or smartphone on the same network to the on board web interface.
- Setup your printer and update the firmware through the [web interface](https://duet3d.com/wiki/Duet_Web_Control).
- All common 3D printer geometries are supported
- Expandable up to 7 extruders with Firmware support for mixing nozzles and remapping axes to use high power external drivers.
- Support for the [PanelDue](https://duet3d.com/wiki/PanelDue): a full colour graphic touch screen.
- Support for [DC42’s IR Z probe](https://www.duet3d.com/IRProbe) and the [Duet3D Smart Effector](https://www.duet3d.com/DeltaSmartEffector) for delta printers.
- Provided with Molex compatible plugs and crimps as well as ferrules for power and heater terminals.
The Duet 2 Ethernet can have [Thermistors ](https://www.duet3d.com/e3d_Thermistor)connected directly, alternatively we have two different temperature sensing daughterboards available:
- [PT100 Temperature daughterboard](https://www.duet3d.com/PT100_DaughterBoard)
- [Thermocouple temperature daughterboard.](https://www.duet3d.com/TC_K_DaughterBoard)
We also supply genuine e3d PT100 and thermocouple sensors compatible with their range of hotends:
- [PT100 sensor](https://www.duet3d.com/PT100Sensor_2wire)
- [Type K Thermocouple sensor.](https://www.duet3d.com/TypeK_TC)
# Wiring
[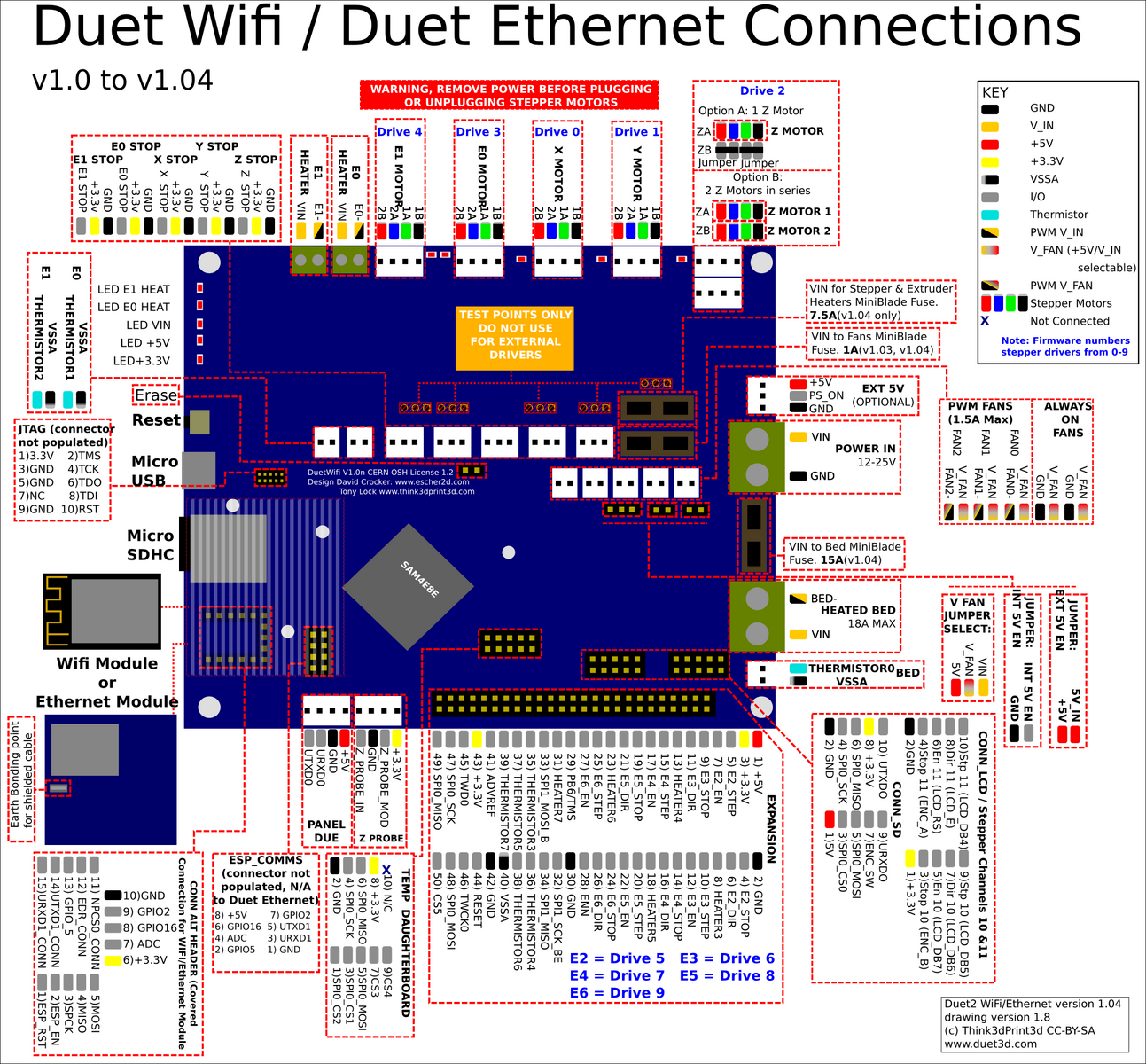](https://wiki.stadtfabrikanten.org/uploads/images/gallery/2026-06/rnwHF5OVwOkHff9p-grafik.png)
## Replacement parts
[https://duet3d.dozuki.com/Wiki/Connector\_and\_spare\_part\_numbers](https://duet3d.dozuki.com/Wiki/Connector_and_spare_part_numbers)
## Fan mosfet
If you short out a PWM fan, the fan driver mosfet will burn out. The replacement part number is **PMV40UN2** or **PMV40UN2R** which is available from the usual electronic component distributors such as Farnell/Newark/element14, Digikey, Mouser and RS. You can also use type **PMV20XNER** or **AO3400A** which have a higher peak current rating. The component identifiers on the board are:
- Fan 0 mosfet: TR5
- Fan 1 mosfet: TR9
- Fan 2 mosfet: TR1
To remove the old mosfet, you will need either a hot air desoldering tool with a small nozzle, or low melting point solder such as ChipQuik . If using hot air, use a shield made from e.g. corrugated cardboard covered with Kapton tape to shield connectors and other plastic components from the hot air. The new mosfet can be soldered in place using a fine-tipped soldering iron, or by putting a little no-clean flux on the pads, placing the new mosfet on top, and using hot air again. Hot air soldering/desoldering is easier if you heat the whole board to about 100-125C on an electric hotplate.
## Heater MOSFETs
Note when removing any of the heater MOSFETs there is significant heat-sinking into the copper of the board. A combination of hot air rework, Chipquick, and a heated plate may be needed to remove one successfully.
- Bed Heater
- TR2: this is an IPD036N04LGBTMA1
- E0, E1 Heaters
- TR3, TR4: this is an AOD4184A (you an also use IPD036N04LGBTMA1)
- The small green component bearing the letters 'bF' is the self-resetting fuse, and the component with stripes is the optional 10K resistor. A piece of Kapton tape was put on the board first to provide additional insulation.
## Mini blade fuses
- 1A mini auto blade fuse protecting the fan circuits when the fan voltage selection jumper is in the VIN position. You can increase the fuse rating to 2A or even 3A if your fans, air pumps etc. draw more than 1A in total.
- 15A fuse for the bed heater circuit
- 7.5A fuse for everything else
## TFT panel backlight inverter IC
If the TFT panel of a **non-integrated** PanelDue assembly suddenly refuses to light up, chances are that the backlight inverter chip has failed. This is a 6-pin chip marked L6CE or L6EN or L6GE or similar (the Pin 1 marking bar can easily be mistaken for a letter I in front of the L). The part number is MP3202DJ. It is available from RS Components, Digikey and Mouser, and also on eBay and Ali Express.
### Other things
Duet has no support for POE and will be fried if it get's connected to passive POE like [Shanqiu Mini UPS FX5-48 / Vultec Continuity UPS30PW-DC](https://old.stadtfabrikanten.org/pages/createpage.action?spaceKey=TH&title=Shanqiu+Mini+UPS+FX5-48+%2F+Vultec+Continuity+UPS30PW-DC&linkCreation=true&fromPageId=56623211) has got.
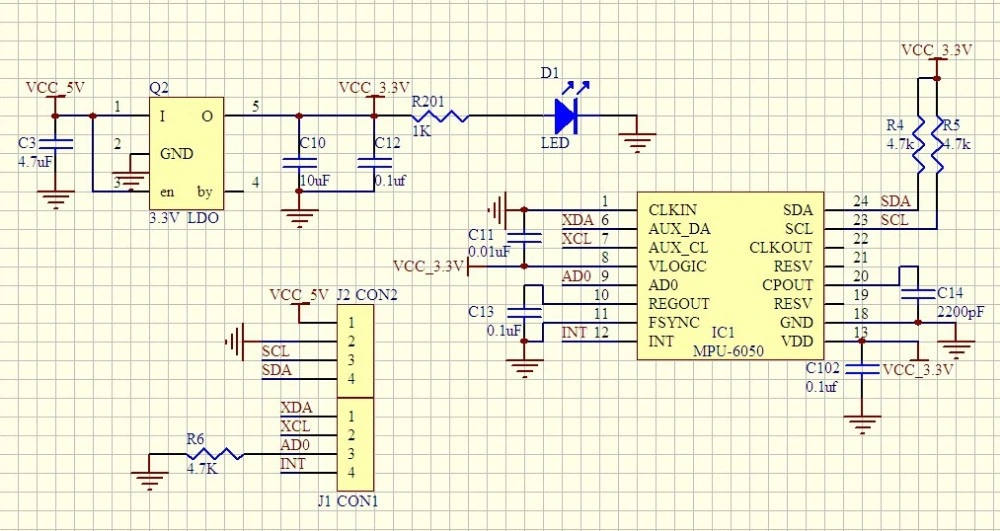
# Ceiling module | Gyroscope and acceleration sensor GY-521 (MPU6050)
[](https://wiki.stadtfabrikanten.org/uploads/images/gallery/2026-06/pe3tw8HBlBUNWatM-grafik.png) [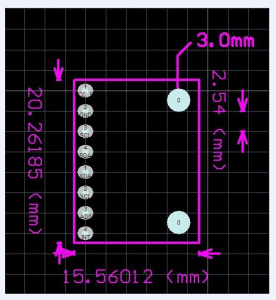](https://wiki.stadtfabrikanten.org/uploads/images/gallery/2026-06/eqQxF2Ex4WN2JuHw-grafik.png) [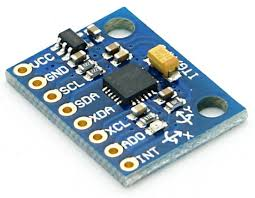](https://wiki.stadtfabrikanten.org/uploads/images/gallery/2026-06/P3W3z6SxflVfS7r5-grafik.png)
## MPU6050 pin configuration
| **Pin number**
| **Pin name**
| **Description**
|
| 1
| Vcc
| Provides power for the module, can be +3V to +5V. Typically +5V is used
|
| 2
| Ground
| Connected to Ground of system
|
| 3
| Serial Clock (SCL)
| Used for providing clock pulse for I2C Communication
|
| 4
| Serial Data (SDA)
| Used for transferring Data through I2C communication
|
| 5
| Auxiliary Serial Data (XDA)
| Can be used to interface other I2C modules with MPU6050. It is optional
|
| 6
| Auxiliary Serial Clock (XCL)
| Can be used to interface other I2C modules with MPU6050. It is optional
|
| 7
| AD0
| If more than one MPU6050 is used a single MCU, then this pin can be used to vary the address
|
| 8
| Interrupt (INT)
| Interrupt pin to indicate that data is available for MCU to read.
|
|
| 5 V | 4 mA | 65 mA | 0-2 V | 2 mA
|
| 9 V | 5 mA | 45 mA | 0-4 V | 3 mA |
| 12 V | 5.5 mA | 42 mA | 0-4 V | 3 mA |
| 24 V
| 12 mA | 40 mA | 0-12 V | 3 mA |
| **Bundle** | **Conductor no.** | **Colours according to DIN ISO 47100** |
| 1 | 1 | white |
| 1 | 2 | brown |
| 1 | 3 | green |
| 1 | 4 | yellow |
| 2 | 5 | grey |
| 2 | 6 | pink |
| 2 | 7 | blue |
| 2 | 8 | red |
| 3 | 9 | black |
| 3 | 10 | violet |
| 3 | 11 | grey-pink |
| 3 | 12 | red-blue |
| 4 | 13 | white-green |
| 4 | 14 | brown-green |
| 4 | 15 | white-yellow |
| 4 | 16 | yellow-brown |
| 5 | 17 | white-grey |
| 5 | 18 | grey-brown |
| 5 | 19 | white-pink |
| 5 | 20 | pink-brown |
| 6 | 21 | white-blue |
| 6 | 22 | brown-blue |
| 6 | 23 | white-red |
| 6 | 24 | brown-red |
Search keywords: Kabelgewebeschlauch selbstschließend, Techflex, Self Wrapping Flat, Sleeve, Kabelschutz, Schlauch, Gewebe, Installationskanal, selbstschließend, flexibel
# Generic used parts and base frame parts | Tablet Lifetab P9812 by Medion